A Hamilton-Jacobi Approach for Nonlinear Model Predictive Control in Applications with Navigational Uncertainty
Abstract
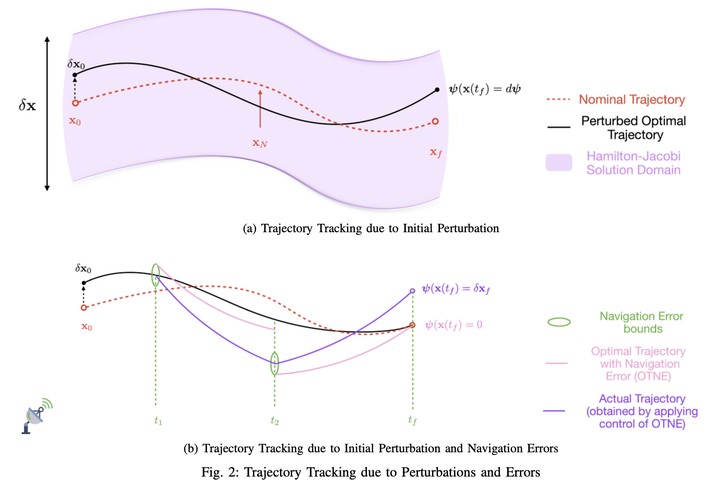
This paper introduces a novel methodology that leverages the Hamilton-Jacobi solution to enhance non-linear model predictive control (MPC) in scenarios affected by navigational uncertainty. Using Hamilton-Jacobi-Theoretic approach, a methodology to improve trajectory tracking accuracy among uncertainties and non-linearities is formulated. This paper seeks to overcome the challenge of realtime computation of optimal control solutions for Model Predictive Control applications by leveraging the Hamilton-Jacobi solution in the vicinity of a nominal trajectory. The efficacy of the proposed methodology is validated within a chaotic system of the planar circular restricted three-body problem.
Amit Jain
Aerospace Engineer
My research interests encompass uncertainty propagation and optimal control, system identification, as well as the application of machine learning and artificial intelligence to astrodynamics challenges.